
Contact Details:
CD Automation UK Ltd
Unit 9
Harvington Business Park, Brampton Road
Eastbourne
East Sussex
BN26 6TS
United Kingdom
Tel: +44 (0) 1323 811100
Fax: +44 (0) 1323 879012
Send Enquiry | Company Information
De-mystifying PID feedback loop control
Company News Tuesday, April 2, 2013: CD Automation UK Ltd
If you can’t tell a PID feedback loop from spaghetti, don’t worry: you are not alone. People are mystified by the full spelling of the acronym PID, which stands for proportional integral derivative. These terms are borrowed from calculus so it is little wonder that people are frightened at the thought of grappling with the complexities of feedback control.
Therefore I will start by telling you that if you were to call a PID loop a compensator instead, nobody apart from the most pedantic academic could take issue with you. OK, some engineers can get quite technical and start talking about lead-lag compensation and suchlike, but the principle is the same.
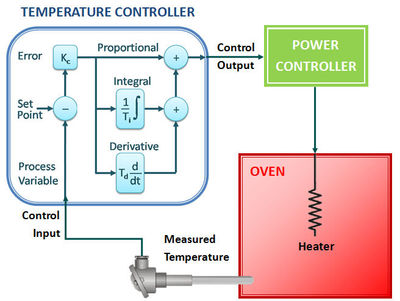
A PID controller examines signals from sensors placed in a process, called feedback signals. When a feedback signal is received, it is compared with the desired value, or setpoint, and a calculation is made of what the necessary response is in order to make the feedback signal, also known as the ‘error’ signal because of its deviation from the setpoint, match the setpoint.
The ‘official’ PID explanation goes something like this:
- ‘P’ stands for proportional and is the factor which determines the basic rate of change at the output in response to changes in the input.
- This proportional element is modified by the ‘I’ which stands for integral and is based on the time that a difference between setpoint and process variable exists.
- Finally, the ‘D’ is the derivative, a function of the rate of change whilst the process variable is moving with respect to the setpoint.
Proportional control varies the amount of power supplied to the heating elements in direct proportion to the difference (the error) between the actual process temperature value and the required set value or set-point. The integral function prevents the initial overshoot on power-up, whilst the derivative function eliminates the temperature instability over time once the set-point is achieved and the process is under control.
Most heating applications can be handled by proportional control only. A Proportional controller has the ability to vary its output between 0-100 percent. This enables it to continuously adjust the output so that the power input to the process is in balance with the process demand. A linear output, typically 0-10V or 4-20mA, is easily understood. As it is an analogue value, it increases in line with the power output requirements of the controller from 0-100 percent.
Give us a call and we can explain integral and derivative control in more detail too. It’s easier than messing around with spaghetti!





